Jeon Ho Kang
Open Menu
Close Menu
Home
Research
Publications
Projects
Experience
Accomplishments
CV
Diffusion Models
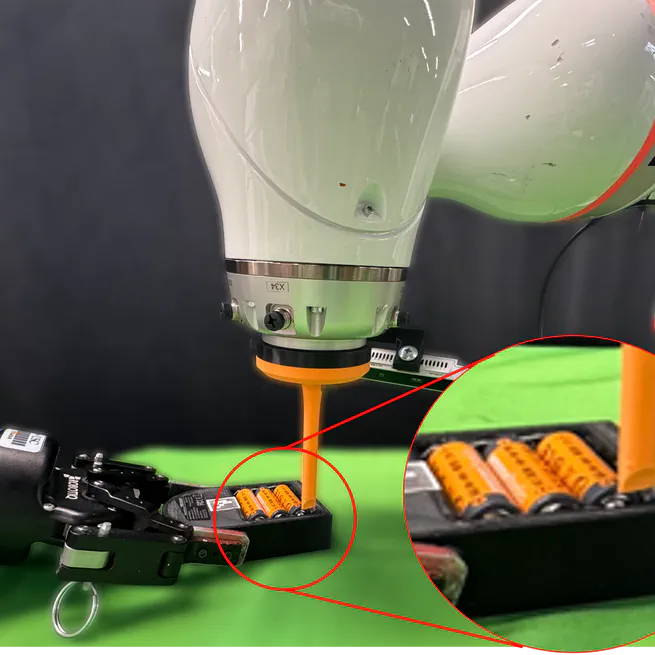
Robotic Compliant Object Prying Using Diffusion Policy Guided by Vision and Force Observations
Mar 1, 2025