A Task Allocation and Scheduling Framework to Facilitate Efficient Human-Robot Collaboration in High-Mix Assembly Applications
Apr 1, 2024· ,,,,·
0 min read
,,,,·
0 min read
Jeon Ho Kang
Neel Dhanaraj
Omey Manyar
Siddhant Wadaskar
Satyandra K. Gupta
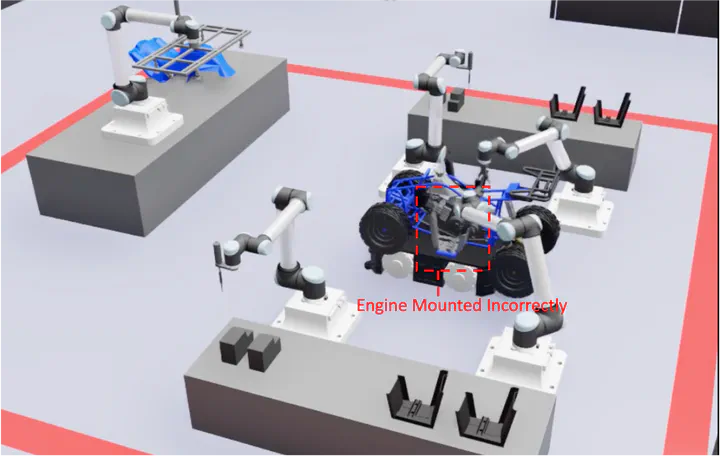 Image credit: IEEE
Image credit: IEEEAbstract
Automating assembly operations effectively increase efficiency while decreasing the need for humans to perform ergonomically challenging tasks. However, full automation of these tasks is still a work in progress. Leveraging the complementary strengths of humans and robots offers a solution. Humans can handle tasks requiring dexterity by working in a team, while robots undertake routine, supportive roles. However, contingency situations created by task execution failures occur more frequently in high-mix applications because of the high variability in the types of tasks. Work cells that enable collaboration between humans and robots are not likely to be economically viable unless contingency situations are detected and efficiently managed. In such situations, additional contingency tasks must be executed to recover from the contingency, and productively utilizing human agents can help the work cell quickly recover from contingencies. This paper presents a framework for automatically assigning and scheduling tasks to humans and robots to complete multiple assemblies while managing the computational complexity of generating optimal task plans. Additionally, we present methods to generate recovery task plans that effectively resolve those contingencies automatically. In our case study, we present an approach to graphically determine the number of tasks and products to consider with limited computing time.
Type
Publication
[Best Paper Award] Proceedings of ASME’s Manufacturing Science and Engineering Conference MSEC 2024 June 17-June 21, 2024, Knoxville TN, USA