Safe Robot to Human Tool Handover to Support Effective Collaboration
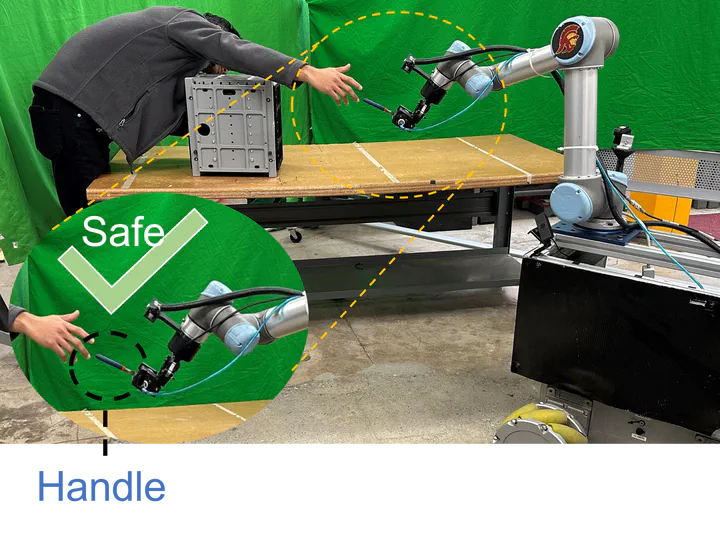 Image credit: ASME
Image credit: ASMEAbstract
Robot-to-human mechanical tool handover is a common task in a human-robot collaborative assembly where humans are performing complex, high-value tasks and robots are performing supporting tasks. This paper discusses an approach to ensure the safe handover of mechanical tools to humans. We introduce a framework to enable smart robotic assistants to safely and efficiently perform robot-to-human tool handovers. Our system utilizes a specialized gripper design capable of firmly grasping objects with irregular geometries. We utilize a tool end detection method so that the robot grasps the tool end and ensures that the human can safely grab the handle during handover. Additionally, the system is able to detect if the tool moves during the grasping process and either restart the pickup or account for the new orientation during hand-off planning. Lastly, the hand-off planning ensures the robot releases the tool at the appropriate time when the human has safely grabbed the handle. Our experimental results indicate that our system can safely and effectively hand off many different types of tools. We have tested the system’s ability to handle contingencies that may occur during the handover process successfully.
Type
Publication
ASME 2023 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference