Force-Conditioned Diffusion Policies for Compliant Sheet Separation Tasks in Bimanual Robotic Cells
Jan 1, 2025·,,, ,·
0 min read
,·
0 min read
Rishabh Shukla
Samrudh Mude
Raj Talan
Neel Dhanaraj
Jeon Ho Kang
Satyandra K. Gupta
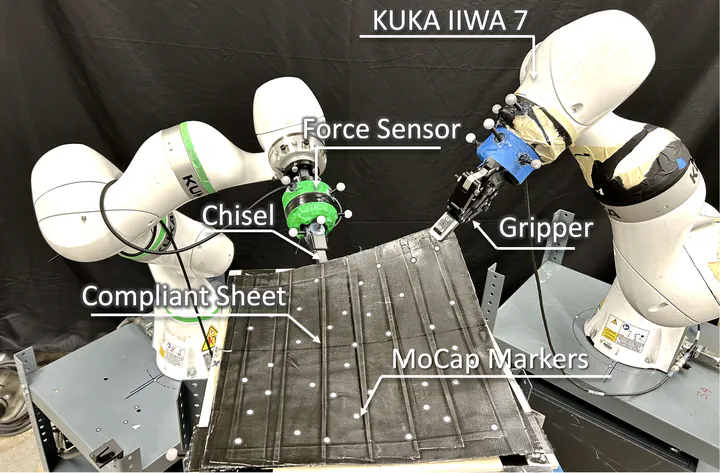 Image credit: IEEE
Image credit: IEEEAbstract
Disassembly is a critical challenge in maintenance and service tasks, particularly in high-precision operations such as electric vehicle (EV) battery recycling.Tasks like prying-open sealed battery covers require precise manipulation and controlled force application. In our approach we collect human demonstrations using a motion capture system, enabling the robot to learn from human-expert disassembly strategies.These demonstrations train a bimanual robotic system in which one arm exerts force with a specialized tool while the other manipulates and removes sealed components.Our method builds on a diffusion-based policy and integrates real-time force sensing to adapt its actions as contact conditions change. We decompose the demonstrations into distinct sub-tasks and apply data augmentation, thereby reducing the number of demonstrations needed and mitigating potential task failures. Our results show that the proposed method, even with a small dataset, achieves a high task success rate and efficiency compared to a standard diffusion technique. We demonstrate in a real-world application that the bimanual system effectively executes chiseling and peeling actions to separate bonded sheet from a substrate.
Type
Publication
International Conference